![[论文理解] Denoising Diffusion Probabilistic Models](https://sunlin-ai.github.io/images/albumsbg.jpg)
扩散模型最早是由 Sohl-Dickstein 等人在2015年提出的1,其模型定义简单且训练高效,但是图片生成质量相比其他生成模型仍有差距,本文工作是在此基础上做的进一步改进。在扩散过程中,如果每一步都添加很小的高斯噪声,那么在反向生成样本时,采样链转换可以设置成条件高斯。基于此观察,作者提出了一种扩散模型 参数化 方法,可以代替 energy based model 里的 denoising score matching 训练和 annealed Langevin dynamics 采样。
论文详解
DDPM 分为2个过程:前向扩散过程 (diffusion process) 和反向生成样本过程 (reverse process)。
扩散过程
这个过程可以看作是将数据 \(\mathbf{x}_0\) 转换成隐变量 \(\mathbf{x}_T\) 的 Markov chain2,在每一步中增加很小的高斯噪声,产生带有噪声的样本 \(\mathbf{x}_1, \dots, \mathbf{x}_T\)。

式中:
\[q_\phi(\mathbf{x}_t \vert \mathbf{x}_{t-1}) = \mathcal{N}(\mathbf{x}_t; \sqrt{1 - \beta_t} \mathbf{x}_{t-1}, \beta_t\mathbf{I}).\]step size 由 variance schedule \(\{\beta_t \in (0, 1)\}_{t=1}^t\) 控制。
(1)如何理解 \(q_\phi(\mathbf{x_t} \vert \mathbf{x_{t-1}})\)?
\(q_\phi(\mathbf{x_t} \vert \mathbf{x_{t-1}})\)的作用是给 \(\mathbf{x_{t-1}}\) 增加很小的高斯噪声,对其 reparameterization,可表示为:
\[\mathbf{x_t} = \sqrt{1-\beta_t}\cdot \mathbf{x_{t-1}} + \sqrt{\beta_t}\cdot \mathbf{z}.\]式中,\(\mathbf{z}\sim \mathcal{N}(\mathbf{0}, \mathbf{I})\)。
随着 step \(t\) 增加, \(\mathbf{x}_0\) 逐渐丢失数据特征,当 \(T \to \infty\),\(\mathbf{x}_T\) 将成为高斯噪声。
令 \(\alpha_t = 1 - \beta_t\),则:
\[\mathbf{x}_1 = \sqrt{\alpha_1}\mathbf{x}_{0} + \sqrt{1 - \alpha_1}\mathbf{z}_{0},\] \[\begin{aligned} \mathbf{x}_2 & = \sqrt{\alpha_2} \mathbf{x}_{1} + \sqrt{1 - \alpha_2 }{\mathbf{z}}_{1}\\ &=\sqrt{\alpha_2}(\sqrt{\alpha_1}\mathbf{x}_{0} + \sqrt{1 - \alpha_1}\mathbf{z}_{0}) + \sqrt{1 - \alpha_2 }{\mathbf{z}}_{1} \\ & = \sqrt{\alpha_1\alpha_2} \mathbf{x}_{0} + \left( \sqrt{\alpha_2 - \alpha_1\alpha_2 }{\mathbf{z}}_{0}+ \sqrt{1 - \alpha_2 }{\mathbf{z}}_{1}\right)\\ \end{aligned},\]因为 \(\mathbf{z}\sim \mathcal{N}(\mathbf{0}, \mathbf{I})\), 所以:
\[\sqrt{\alpha_2 - \alpha_1\alpha_2 }{\mathbf{z}}_{0}\sim \mathcal{N}(\mathbf{0}, (\alpha_2 - \alpha_1\alpha_2)\mathbf{I}),\] \[\sqrt{1 - \alpha_2 }{\mathbf{z}}_{1}\sim \mathcal{N}(\mathbf{0}, (1 -\alpha_2)\mathbf{I}),\]2个高斯分布相加依然是高斯分布,所以:
\[\sqrt{\alpha_2 - \alpha_1\alpha_2 }{\mathbf{z}}_{0}+\sqrt{1 - \alpha_2 }{\mathbf{z}}_{1}\sim \mathcal{N}(\mathbf{0}, (1-\alpha_1\alpha_2)\mathbf{I}),\]进而可得:
\[\mathbf{x}_2= \sqrt{\alpha_1\alpha_2} \mathbf{x}_{0} + \left( \sqrt{1-\alpha_1\alpha_2}{\mathbf{z}}\right),\]以此类推:
\[\mathbf{x}_t = \sqrt{\bar{\alpha}_t}\mathbf{x_0} + \sqrt{1 - \bar{\alpha}_t}\mathbf{z},\]式中, \(\bar{\alpha}_t = \prod_{i=1}^T \alpha_i\)
所以当已知初始状态 \(\mathbf{x_0}\),可以采样得到任意step \(t\) 的 \(\mathbf{x_{t}}\),上式又可以表示成:
\[q(\mathbf{x}_t \vert \mathbf{x}_0) = \mathcal{N}(\mathbf{x}_t; \sqrt{\bar{\alpha}_t} \mathbf{x}_0, (1 - \bar{\alpha}_t)\mathbf{I}).\](2)如何理解 variance schedule \(\beta_t\)?
\(\beta_t\) 的取值直接影响到 \(\bar{\alpha}_t\),它们的关系如下:
\[\bar{\alpha}_t = \prod_{i=1}^T \alpha_i= \prod_{i=1}^T (1-\beta_i).\]\(\sqrt{\bar{\alpha}_t}\) 和 \(\sqrt{1 - \bar{\alpha}_t}\) 可以分别看作数据 \(\mathbf{x}_0\) 的权重和噪声 \(\mathbf{z}\) 的权重。
通常当样本越接近噪声,可以使用越大的 step size,即\(\beta_1 < \beta_2 < \dots < \beta_T\), 所以 \(\bar{\alpha}_1 > \dots > \bar{\alpha}_T\)。
如果 \(\beta_t\) 线性值,则\(\sqrt{\bar{\alpha}_t}\) 和 \(\sqrt{1 - \bar{\alpha}_t}\) 随着时间步的曲线如下:
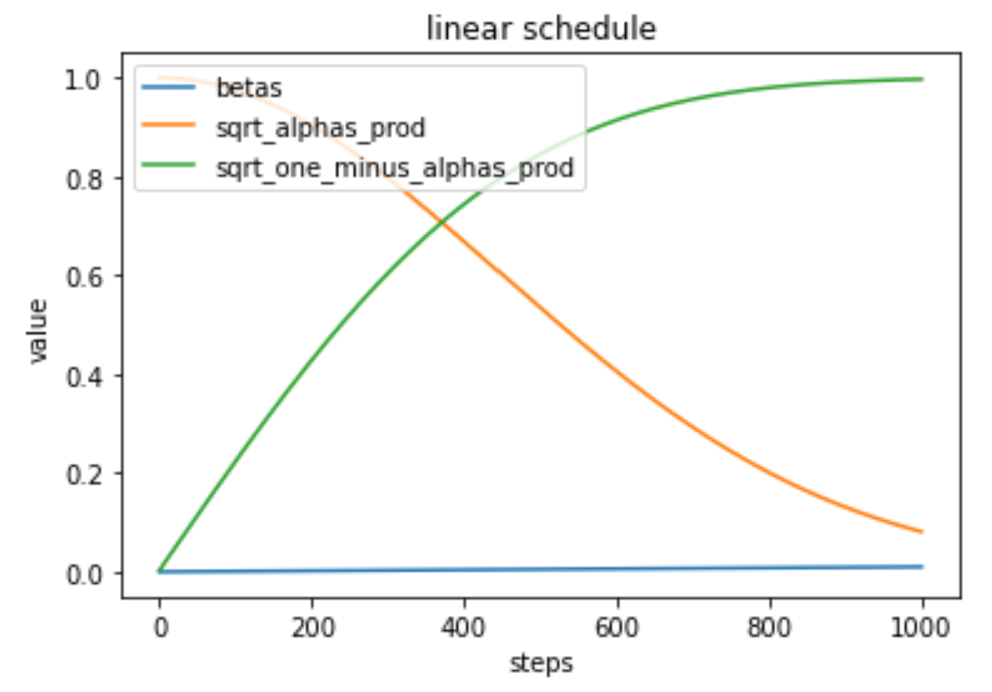
由上图可知,随着时间步的增加,数据的权重逐步减小,而噪声的权重逐步增大。
所以 \(\beta_t\) 的作用是给数据和噪声在不同时间步分配权重。
反向过程
反向过程可以看作是将数据 latent 变量 \(\mathbf{x_T}\) 转换成 \(\mathbf{x_0}\) 的Markov chain,在每一步中去除高斯噪声,产生噪声越来越少的样本 \(\mathbf{x}_{T-1}, \dots, \mathbf{x}_0\)。
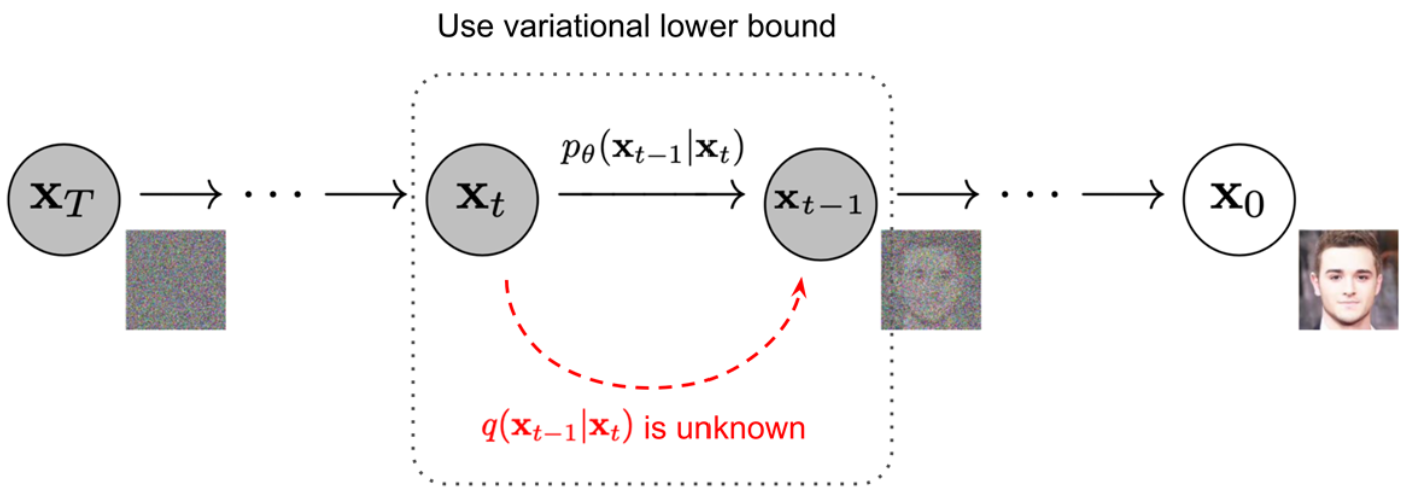
如果知道 \(q(\mathbf{x_{t-1}}\mid\mathbf{x_t})\),就可以采样 \(\mathbf{x_T}\sim \mathcal{N}(\mathbf{0}, \mathbf{I})\),反向得到 \(q(\mathbf{x_0})\),可是 \(q(\mathbf{x_{t-1}}\mid \mathbf{x_t})\)依赖于整个数据分布,所以我们需要用神经网络模型 \(p_{\theta}\) 来近似:
\[p_{\theta}(\mathbf{x_0},\ldots,\mathbf{x_{T-1}} \vert \mathbf{x_T}) = \prod^T_{t=1} p_\theta(\mathbf{x_{t-1}} \vert \mathbf{x_{t}}) \quad p_{latent}(\mathbf{x_T})=\mathcal{N}(\mathbf{0}, \mathbf{I}),\]式中:
\[p_{\theta}(\mathbf{x_{t-1}} \mid \mathbf{x_{t}}) = \mathcal{N}(\mathbf{x_{t-1}}; \mu_{\theta}(\mathbf{x_{t}},t) ,\sigma_{\theta}(\mathbf{x_{t}},t)^2\mathbf{I}),\]当已知 \(\mathbf{x_{t}}\) 时, \(\mathbf{x_{t-1}}\) 可以表示成:
\[\mathbf{x_{t-1}} =\mu_{\theta}(\mathbf{x_{t}},t) + \sigma_{\theta}(\mathbf{x_{t}},t)\cdot \mathbf{z}.\]函数 \(p_{\theta}(\mathbf{x_{t-1}}\mid \mathbf{x_{t}})\)作用是去除高斯噪声,输入高斯噪声图片 \(\mathbf{x_T}\),其将逐步还原成图片 \(\mathbf{x_{0}}\)。
模型训练
给定数据 \(\mathbf{x_0}\) ,喂给模型后,希望其发生概率 \(p_θ(\mathbf{x_0})\) 越大越好,其等同于让 \(\text{ELBO}\) 越大越好:
\[\begin{aligned} \log p_{\theta}(\mathbf{x}_0) &\geq \log p_\theta(\mathbf{x}_0) - D_\text{KL}(q(\mathbf{x}_{1:T}\vert\mathbf{x}_0) \| p_\theta(\mathbf{x}_{1:T}\vert\mathbf{x}_0) ) \\ &= \log p_\theta(\mathbf{x}_0) - \mathbb{E}_{\mathbf{x}_{1:T}\sim q(\mathbf{x}_{1:T} \vert \mathbf{x}_0)} \Big[ \log\frac{q(\mathbf{x}_{1:T}\vert\mathbf{x}_0)}{p_\theta(\mathbf{x}_{0:T}) / p_\theta(\mathbf{x}_0)} \Big] \\ &= \log p_\theta(\mathbf{x}_0) - \mathbb{E}_q \Big[ \log\frac{q(\mathbf{x}_{1:T}\vert\mathbf{x}_0)}{p_\theta(\mathbf{x}_{0:T})} + \log p_\theta(\mathbf{x}_0) \Big] \\ &= -\mathbb{E}_q \Big[ \log \frac{q(\mathbf{x}_{1:T}\vert\mathbf{x}_0)}{p_\theta(\mathbf{x}_{0:T})} \Big]:=\text { ELBO} \end{aligned},\]现在优化目标是让 \(-\text{ELBO}\) 越小越好,可以进一步转换为3:
\[\begin{aligned} \mathcal{L}=-\text { ELBO} &= \mathbb{E}_{q(\mathbf{x}_{0:T})} \Big[ \log\frac{q(\mathbf{x}_{1:T}\vert\mathbf{x}_0)}{p_\theta(\mathbf{x}_{0:T})} \Big] \\ &= \mathbb{E}_q \Big[ \log\frac{\prod_{t=1}^T q(\mathbf{x}_t\vert\mathbf{x}_{t-1})}{ p_\theta(\mathbf{x}_T) \prod_{t=1}^T p_\theta(\mathbf{x}_{t-1} \vert\mathbf{x}_t) } \Big] \\ &= \mathbb{E}_q \Big[ -\log p_\theta(\mathbf{x}_T) + \sum_{t=1}^T \log \frac{q(\mathbf{x}_t\vert\mathbf{x}_{t-1})}{p_\theta(\mathbf{x}_{t-1} \vert\mathbf{x}_t)} \Big] \\ &= \mathbb{E}_q \Big[ -\log p_\theta(\mathbf{x}_T) + \sum_{t=2}^T \log \frac{q(\mathbf{x}_t\vert\mathbf{x}_{t-1})}{p_\theta(\mathbf{x}_{t-1} \vert\mathbf{x}_t)} + \log\frac{q(\mathbf{x}_1 \vert \mathbf{x}_0)}{p_\theta(\mathbf{x}_0 \vert \mathbf{x}_1)} \Big] \\ &= \mathbb{E}_q \Big[ -\log p_\theta(\mathbf{x}_T) + \sum_{t=2}^T \log \Big( \frac{q(\mathbf{x}_{t-1} \vert \mathbf{x}_t, \mathbf{x}_0)}{p_\theta(\mathbf{x}_{t-1} \vert\mathbf{x}_t)}\cdot \frac{q(\mathbf{x}_t \vert \mathbf{x}_0)}{q(\mathbf{x}_{t-1}\vert\mathbf{x}_0)} \Big) + \log \frac{q(\mathbf{x}_1 \vert \mathbf{x}_0)}{p_\theta(\mathbf{x}_0 \vert \mathbf{x}_1)} \Big] \\ &= \mathbb{E}_q \Big[ -\log p_\theta(\mathbf{x}_T) + \sum_{t=2}^T \log \frac{q(\mathbf{x}_{t-1} \vert \mathbf{x}_t, \mathbf{x}_0)}{p_\theta(\mathbf{x}_{t-1} \vert\mathbf{x}_t)} + \sum_{t=2}^T \log \frac{q(\mathbf{x}_t \vert \mathbf{x}_0)}{q(\mathbf{x}_{t-1} \vert \mathbf{x}_0)} + \log\frac{q(\mathbf{x}_1 \vert \mathbf{x}_0)}{p_\theta(\mathbf{x}_0 \vert \mathbf{x}_1)} \Big] \\ &= \mathbb{E}_q \Big[ -\log p_\theta(\mathbf{x}_T) + \sum_{t=2}^T \log \frac{q(\mathbf{x}_{t-1} \vert \mathbf{x}_t, \mathbf{x}_0)}{p_\theta(\mathbf{x}_{t-1} \vert\mathbf{x}_t)} + \log\frac{q(\mathbf{x}_T \vert \mathbf{x}_0)}{q(\mathbf{x}_1 \vert \mathbf{x}_0)} + \log \frac{q(\mathbf{x}_1 \vert \mathbf{x}_0)}{p_\theta(\mathbf{x}_0 \vert \mathbf{x}_1)} \Big]\\ &= \mathbb{E}_q \Big[ \log\frac{q(\mathbf{x}_T \vert \mathbf{x}_0)}{p_\theta(\mathbf{x}_T)} + \sum_{t=2}^T \log \frac{q(\mathbf{x}_{t-1} \vert \mathbf{x}_t, \mathbf{x}_0)}{p_\theta(\mathbf{x}_{t-1} \vert\mathbf{x}_t)} - \log p_\theta(\mathbf{x}_0 \vert \mathbf{x}_1) \Big] \\ &= \mathbb{E}_q [\underbrace{D_\text{KL}(q(\mathbf{x}_T \vert \mathbf{x}_0) \parallel p_\theta(\mathbf{x}_T))}_{\mathcal{L}_T} + \sum_{t=2}^T \underbrace{D_\text{KL}(q(\mathbf{x}_{t-1} \vert \mathbf{x}_t, \mathbf{x}_0) \parallel p_\theta(\mathbf{x}_{t-1} \vert\mathbf{x}_t))}_{\mathcal{L}_{t-1}} \underbrace{- \log p_\theta(\mathbf{x}_0 \vert \mathbf{x}_1)}_{\mathcal{L}_0} ] \end{aligned}\]\(\mathcal{L_T}\) 与模型参数 \(\theta\) 无关,可以忽略 ;\(\mathcal{L_0}\) 是重构损失项 ;\(\mathcal{L_{t−1}}\) 是与高斯分布之间的 KL divergences。
下面着重分析 \(\mathcal{L_{t−1}}\) ,其是关于 \(q\left(\mathbf{x_{t-1}} \mid \mathbf{x_{t}}, \mathbf{x_{0}}\right)\) 和 \(p_{\theta}(\mathbf{x_{t-1}} \mid \mathbf{x_{t}})\) KL散度:
(1)\(q\left(\mathbf{x_{t-1}} \mid \mathbf{x_{t}}, \mathbf{x_{0}}\right)\)
根据Bayes rule:
\[\begin{equation}\begin{aligned} q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_{t}, \mathbf{x}_{0}\right)=& \frac{q\left(\mathbf{x}_{t} \mid \mathbf{x}_{t-1}\right) q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_{0}\right)}{q\left(\mathbf{x}_{t} \mid \mathbf{x}_{0}\right)} \\ =& \frac{\mathcal{N}\left(\mathbf{x}_{t} ; \sqrt{\alpha_{t}} \mathbf{x}_{t-1}, \beta_{t} I\right) \mathcal{N}\left(\mathbf{x}_{t-1} ; \sqrt{\bar{\alpha}_{t-1}} \mathbf{x}_{0},\left(1-\bar{\alpha}_{t-1}\right) I\right)}{\mathcal{N}\left(\mathbf{x}_{t} ; \sqrt{\bar{\alpha}_{t}} \mathbf{x}_{0},\left(1-\bar{\alpha}_{t}\right) I\right)} \\ =&\left(2 \pi \beta_{t}\right)^{-\frac{d}{2}}\left(2 \pi\left(1-\bar{\alpha}_{t-1}\right)\right)^{-\frac{d}{2}}\left(2 \pi\left(1-\bar{\alpha}_{t}\right)\right)^{\frac{d}{2}} \times \\ & \exp \left(-\frac{\left\|\mathbf{x}_{t}-\sqrt{\alpha_{t}} \mathbf{x}_{t-1}\right\|^{2}}{2 \beta_{t}}-\frac{\left\|\mathbf{x}_{t-1}-\sqrt{\bar{\alpha}_{t-1}} \mathbf{x}_{0}\right\|^{2}}{2\left(1-\bar{\alpha}_{t-1}\right)}+\frac{\left\|\mathbf{x}_{t}-\sqrt{\bar{\alpha}_{t}} x_{0}\right\|^{2}}{2\left(1-\bar{\alpha}_{t}\right)}\right) \\ =&\left(2 \pi \tilde{\beta}_{t}\right)^{-\frac{d}{2}} \exp \left(-\frac{1}{2 \tilde{\beta}_{t}}\left\|\mathbf{x}_{t-1}-\left( \frac{\sqrt{\bar{\alpha}_{t-1}} \beta_{t}}{1-\bar{\alpha}_{t}} \mathbf{x}_{0}+\frac{\sqrt{\alpha_{t}}\left(1-\bar{\alpha}_{t-1}\right)}{1-\bar{\alpha}_{t}} \mathbf{x}_{t}\right) \right\|^{2}\right) \end{aligned}\end{equation}\]所以:
\[q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_{t}, \mathbf{x}_{0}\right)=\mathcal{N}\left(\mathbf{x}_{t-1} ; \frac{\sqrt{\bar{\alpha}_{t-1}} \beta_{t}}{1-\bar{\alpha}_{t}} \mathbf{x}_{0}+\frac{\sqrt{\alpha_{\iota}}\left(1-\bar{\alpha}_{ t-1}\right)}{1-\bar{\alpha}_{t}} \mathbf{x}_{t}, \tilde{\beta}_{t} I\right),\]上式可以表示成:
\[q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_{t}, \mathbf{x}_{0}\right)=\mathcal{N}\left(\mathbf{x}_{t-1} ; \tilde{\boldsymbol{\mu}}_{t}\left(\mathbf{x}_{t}, \mathbf{x}_{0}\right), \tilde{\beta}_{t} \mathbf{I}\right),\]式中:
\[\tilde{\boldsymbol{\mu}_{t}}\left(\mathbf{x_{t}}, \mathbf{x_{0}}\right)=\frac{\sqrt{\bar{\alpha}_{t-1}} \beta_{t}}{1-\bar{\alpha}_{t}} \mathbf{x_{0}}+\frac{\sqrt{\alpha_{t}}\left(1-\bar{\alpha}_{t-1}\right)}{1-\bar{\alpha}_{t}} \mathbf{x_{t}}\\ \tilde{\beta}_{t}=\frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_{t}} \beta_{t},\]因为 :
\[\mathbf{x_t} = \sqrt{\bar{\alpha}_t}\mathbf{x_0} + \sqrt{1 - \bar{\alpha}_t}\mathbf{z},\]所以 :
\[\mathbf{x_0} = \frac{\mathbf{x_t}-\sqrt{1 - \bar{\alpha}_t}\mathbf{z}}{\sqrt{\bar{\alpha_t}}},\]将 \(\mathbf{x_0}\) 代入 \(\tilde{\mu}_{t}\) 可进一步得:
\[\tilde{\boldsymbol{\mu}}_{t}\left(\mathbf{x_{t}}, t\right)=\frac{1}{\sqrt{\alpha_{t}}}\left(\mathbf{x_{t}}-\frac{\beta_{t}}{\sqrt{1-\bar{\alpha}_{t}}} \mathbf{z}\right).\](2) \(p_\theta(\mathbf{x_{t-1}} \mid \mathbf{x_{t}})\)
\[p_\theta(\mathbf{x}_{t-1} \mid \mathbf{x}_{t}) = \mathcal{N}(\mathbf{x}_{t-1}; \mu_{\theta}(\mathbf{x}_{t},t) ,\sigma_{\theta}(\mathbf{x}_{t},t)^2\mathbf{I}).\]为做简化,将\(\sigma_{\theta}(\mathbf{x_{t}},t)^2\) 设置成时间相关但是不用学习的参数,即 \(\sigma^2_{t}\)。
一般将 \(\sigma_{t}^2\) 设置成 \(\beta_{t}\) 或者 \(\tilde{\beta_{t}}\) 。
注意到 \(\mu_θ\) 是为了预测 \(\tilde{\mu_{t}}\),又因为 \(\mathbf{x_{t}}\) 是作为已知项输入给模型的,所以可以将 \(\mu_{θ}\) 参数化为:
\[{\mu}_{\theta}\left(\mathbf{x_{t}}, t\right)=\frac{1}{\sqrt{\alpha_{t}}}\left(\mathbf{x_{t}}-\frac{\beta_{t}}{\sqrt{1-\bar{\alpha}_{t}}} \mathbf{z}_\theta(\mathbf{x_t},t)\right).\]上式中的 \(\mathbf{z_\theta}\) 就是需要学习的神经网络模型 ,下面继续推导模型 \(\mathbf{z_\theta}\) 的优化目标:
因为 \(q(\mathbf{x_{t-1}} \vert \mathbf{x_t}, \mathbf{x_0})\) 和 \(p_\theta(\mathbf{x_{t-1}} \vert \mathbf{x_t})\) 都是高斯分布,并且有着同样的 covariance matirx \(\tilde{\beta_{t}}I\),所以它们的 KL divergence 是均值的 \(l2\) 距离的\(\frac{1}{2\tilde{\beta_{t}}}\)倍,即:
\[\begin{aligned} & D_{KL}\left(q\left(\mathbf{x}_{t-1} \mid \mathbf{x}_{t}, \mathbf{x}_{0}\right) \| p_{\theta}\left(\mathbf{x}_{t-1} \mid \mathbf{x}_{t}\right)\right) \\ &=\frac{1}{2 \tilde{\beta}_{t}} \mathbb{E}_{\mathbf{x}_{0}}\left\|\frac{\sqrt{\bar{\alpha}_{t-1}} \beta_{t}}{1-\bar{\alpha}_{t}} \mathbf{x}_{0}+\frac{\sqrt{\alpha_{t}}\left(1-\bar{\alpha}_{t-1}\right)}{1-\bar{\alpha}_{t}} \mathbf{x}_{t}-\frac{1}{\sqrt{\alpha_{t}}}\left(\mathbf{x}_{t}-\frac{\beta_{t}}{\sqrt{1-\bar{\alpha}_{t}}} \mathbf{z}_{\theta}\left(\mathbf{x}_{t}, t\right)\right)\right\|^{2} \\ &=\frac{1}{2 \tilde{\beta}_{t}} \mathbb{E}_{\mathbf{x}_{0}, \epsilon}\left\|\frac{\sqrt{\bar{\alpha}_{t-1}} \beta_{t}}{1-\bar{\alpha}_{t}} \cdot \frac{\mathbf{x}_{t}-\sqrt{1-\bar{\alpha}_{t}} \epsilon}{\sqrt{\bar{\alpha}_{t}}}+\frac{\sqrt{\alpha_{t}}\left(1-\bar{\alpha}_{t-1}\right)}{1-\bar{\alpha}_{t}} \mathbf{x}_{t}-\frac{1}{\sqrt{\alpha_{t}}}\left(\mathbf{x}_{t}-\frac{\beta_{t}}{\sqrt{1-\bar{\alpha}_{t}}} \mathbf{z}_{\theta}\left(\mathbf{x}_{t}, t\right)\right)\right\|^{2} \\ &=\frac{1}{2 \tilde{\beta}_{t}} \cdot \frac{\beta_{t}^{2}}{\alpha_{t}\left(1-\bar{\alpha}_{t}\right)} \mathbb{E}_{\mathbf{x}_{0}, \epsilon}\left\|0 \cdot \mathbf{x}_{t}+\epsilon-\mathbf{z}_{\theta}\left(\mathbf{x}_{t}, t\right)\right\|^{2} \\ &=\frac{\beta_{t}^{2}}{2 \frac{1-\bar{\alpha}_{t-1}}{1-\bar{\alpha}_{t}} \beta_{t} \alpha_{t}\left(1-\bar{\alpha}_{t}\right)} \mathbb{E}_{\mathbf{x}_{0}, \epsilon}\left\|\epsilon-\mathbf{z}_{\theta}\left(\mathbf{x}_{t}, t\right)\right\|^{2} \\ &=\frac{\beta_{t}}{2 \alpha_{t}\left(1-\bar{\alpha}_{t-1}\right)} \mathbb{E}_{\mathbf{x}_{0}, \epsilon}\left\|\epsilon-\mathbf{z}_{\theta}\left(\mathbf{x}_{t}, t\right)\right\|^{2}\\ &=\frac{\beta_{t}}{2 \alpha_{t}\left(1-\bar{\alpha}_{t-1}\right)} \mathbb{E}_{\mathbf{x}_{0}, \epsilon}\left\|\epsilon-\mathbf{z}_{\theta}\left(\sqrt{\bar{\alpha}_t}\mathbf{x}_0 + \sqrt{1 - \bar{\alpha}_t}\mathbf{\epsilon}, t\right)\right\|^{2}\\\end{aligned},\]Ho et al.2发现忽略上式的权重项,可以得到更好的训练效果,学习目标可以简化为:
\[L_t^\text{simple} = \mathbb{E}_{\mathbf{x}_{0}, \epsilon}\left\|\epsilon-\mathbf{z}_{\theta}\left(\sqrt{\bar{\alpha}_t}\mathbf{x}_0 + \sqrt{1 - \bar{\alpha}_t}\mathbf{\epsilon}, t\right)\right\|^{2},\]至于 \(\mathcal{L_0}\) 重构损失,因为:
\[\mathbf{x}_{1}=\sqrt{\bar{\alpha}_{1}} \mathbf{x}_{0}+\sqrt{1-\bar{\alpha}{ }_{1}} \epsilon=\sqrt{\alpha_{1}} x_{0}+\sqrt{1-\alpha_{1}} \epsilon,\]所以 \(\mathcal{L_0}\) 又可以表示成:
\[\begin{aligned} \mathbb{E}_{q} \log p_{\theta}\left(\mathbf{x}_{0} \mid \mathbf{x}_{1}\right) &=\mathbb{E}_{q} \log \mathcal{N}\left(\mathbf{x}_{0} ; \frac{1}{\sqrt{\alpha_{1}}}\left(\mathbf{x}_{1}-\frac{\beta_{1}}{\sqrt{1-\alpha_{1}}} \mathbf{z}_{\theta}\left(\mathbf{x}_{1}, 1\right)\right), \beta_{1} I\right) \\ &=\mathbb{E}_{q}\left(-\frac{d}{2} \log 2 \pi \beta_{1}-\frac{1}{2 \beta_{1}}\left\|\mathbf{x}_{0}-\frac{1}{\sqrt{\alpha_{1}}}\left(\mathbf{x}_{1}-\frac{\beta_{1}}{\sqrt{1-\alpha_{1}}} \mathbf{z}_{\theta}\left(\mathbf{x}_{1}, 1\right)\right)\right\|^{2}\right) \\ &=-\frac{d}{2} \log 2 \pi \beta_{1}-\frac{1}{2 \beta_{1}} \mathbb{E}_{\mathbf{x}_{0}, \epsilon}\left\|\mathbf{x}_{0}-\frac{1}{\sqrt{\alpha_{1}}}\left(\sqrt{\alpha_{1}} \mathbf{x}_{0}+\sqrt{1-\alpha_{1}} \epsilon-\frac{\beta_{1}}{\sqrt{1-\alpha_{1}}} \mathbf{z}_{\theta}\left(\mathbf{x}_{1}, 1\right)\right)\right\|^{2} \\ &=-\frac{d}{2} \log 2 \pi \beta_{1}-\frac{1}{2 \beta_{1}} \mathbb{E}_{\mathbf{x}_{0}, \epsilon}\left\|\frac{\sqrt{\beta_{1}}}{\sqrt{\alpha_{1}}}\left(\epsilon-\mathbf{z}_{\theta}\left(\mathbf{x}_{1}, 1\right)\right)\right\|^{2} \\ &=-\frac{d}{2} \log 2 \pi \beta_{1}-\frac{1}{2 \alpha_{1}} \mathbb{E}_{\mathbf{x}_{0}, \epsilon}\left\|\epsilon-\mathbf{z}_{\theta}\left(\mathbf{x}_{1}, 1\right)\right\|^{2} \end{aligned}.\]与模型相关的只有一项 \(\mathbf{z_{\theta}}\left(\mathbf{x_{1}}, 1\right)\),即在时间步1时的预测值。
经过上述推导,最后 DDPM 的优化目标可以表示成:
\[L_\text{simple} = L_t^\text{simple} + C.\]式中 \(C\) 是不依赖于 \(\theta\) 的常数。
生成样本
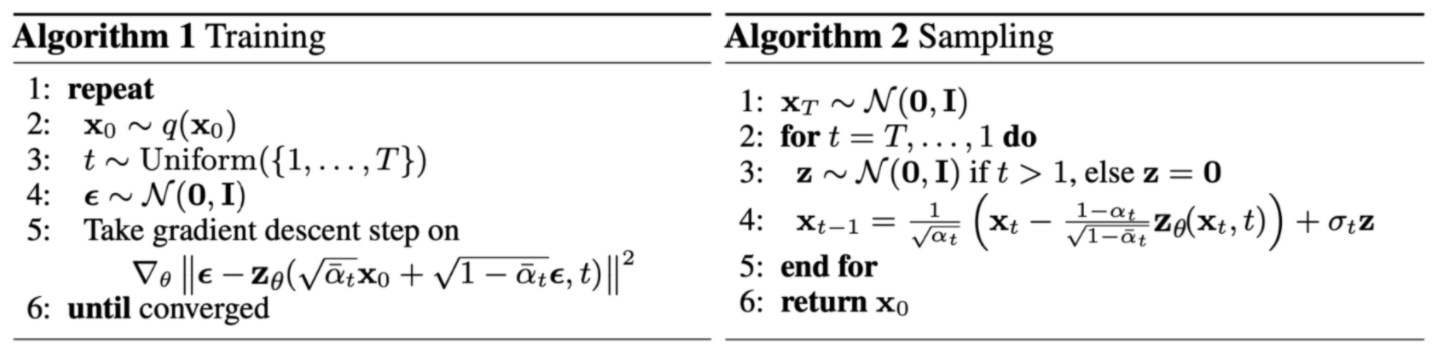
当学习得到模型 \(\mathbf{z_\theta}\)之后,可以使用它来生成样本,对每个时间步按照下式迭代:
\[\begin{aligned} \mathbf{x_{t-1}} &=\mu_{\theta}(\mathbf{x}_{t},t) + \sigma_{\theta}(\mathbf{x}_{t},t)\cdot \mathbf{z}\\ &=\frac{1}{\sqrt{\alpha_{t}}}\left(\mathbf{x}_{t}-\frac{\beta_{t}}{\sqrt{1-\bar{\alpha}_{t}}} \cdot\mathbf{z}_\theta(\mathbf{x}_{t},t)\right)+ \sigma_{t}\cdot \mathbf{z}\\ &=\frac{1}{\sqrt{\alpha_{t}}}\left(\mathbf{x}_{t}-\frac{1-\alpha_{t}}{\sqrt{1-\bar{\alpha}_{t}}}\cdot \mathbf{z}_\theta(\mathbf{x}_{t},t)\right)+ \sigma_{t}\cdot \mathbf{z} \end{aligned}.\]综上,DDPM的训练和采样具体步骤如下2:
实验结果
神经网络模型使用 PixelCNN++ 的 backbone,即基于 Wide ResNet 的 U-Net,为了更方便的实施,将 weight normalization 替换成 group normalization。
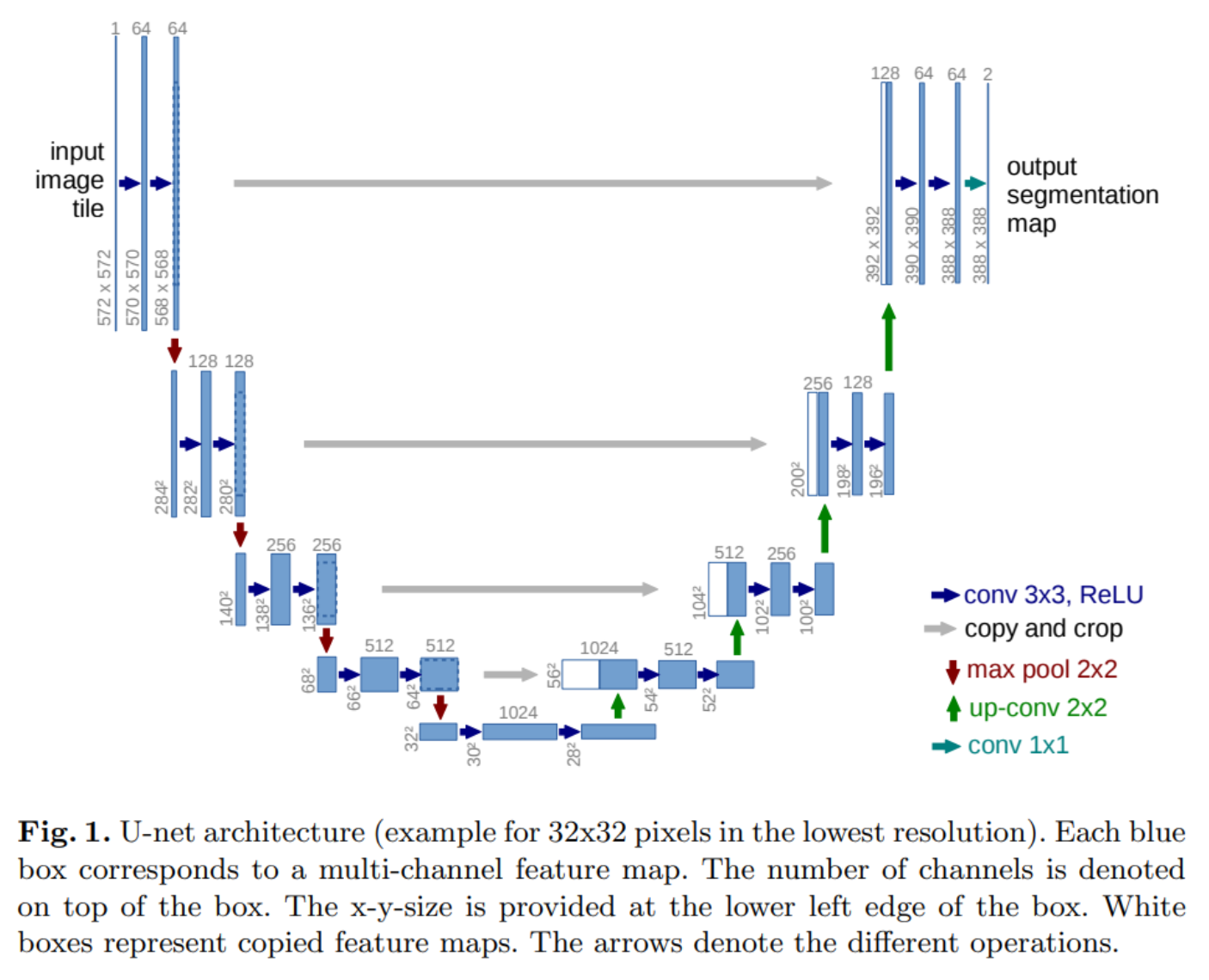
在我们的32 × 32 的模型使用了4个特征尺度(32 × 32 到 4 × 4),而 256 × 256 模型使用了6个特征尺度。不同的分辨率下,有2个卷积残差块,在 16 × 16 的分辨率下,连个卷积残差块中间增加一个 self-attention 模块。
时间步 $t$ 通过 Transformer sinusoidal position embedding 加到每个残差块里。
现在,让我们来看看实验结果。
图片生成质量
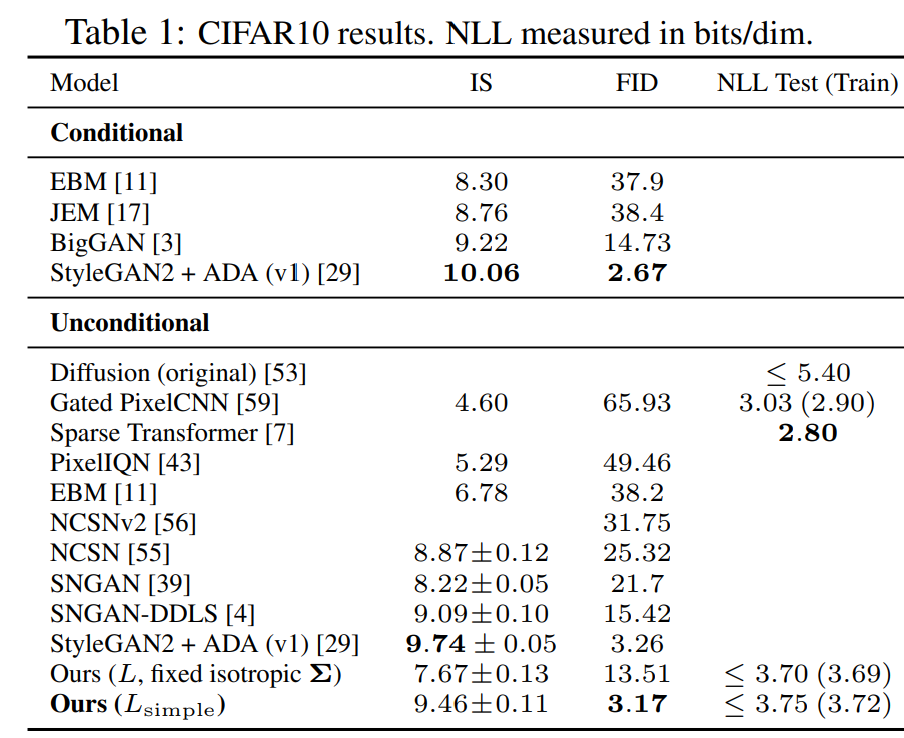
在 CIFAR10 数据集上, 在训练集上,无条件模型 FID 分数达到 3.17;在测试集上 FID 分数为5.24,图片质量超过其他模型。
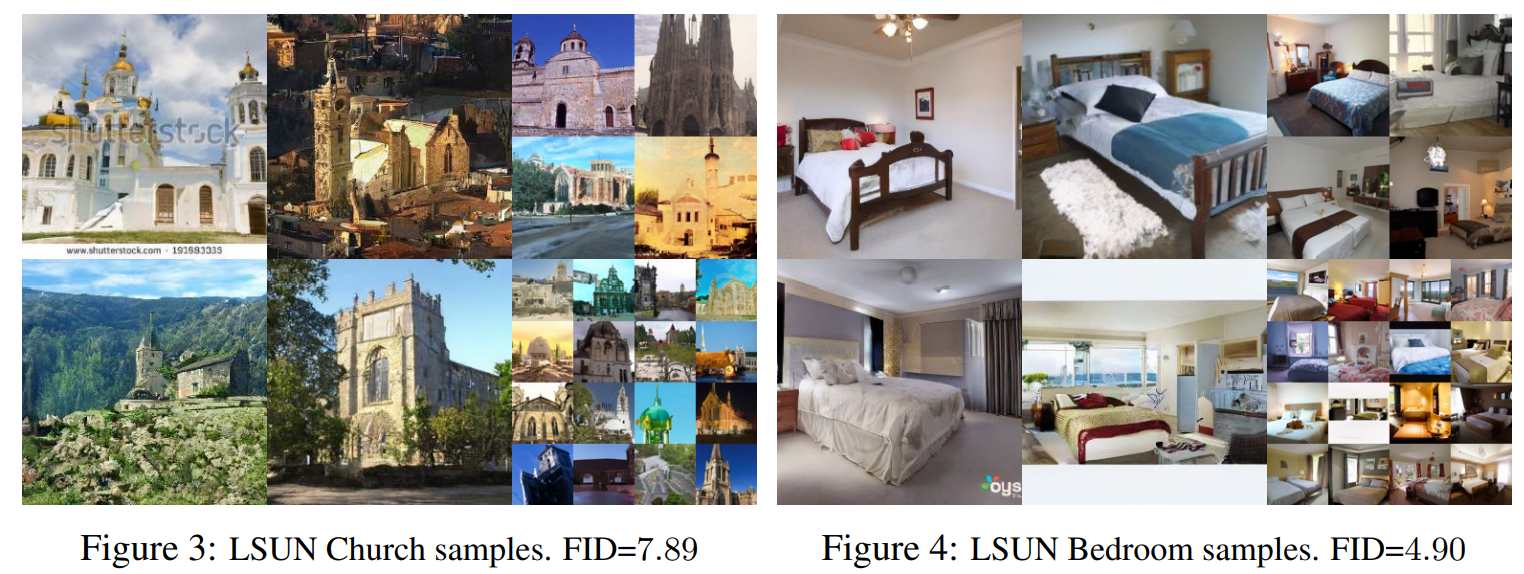
以下是在 LSUN 数据集中学习和生成的图像,非常漂亮。
损失函数比较
接下来,我们将讨论简化损失函数的影响,结果如下表:
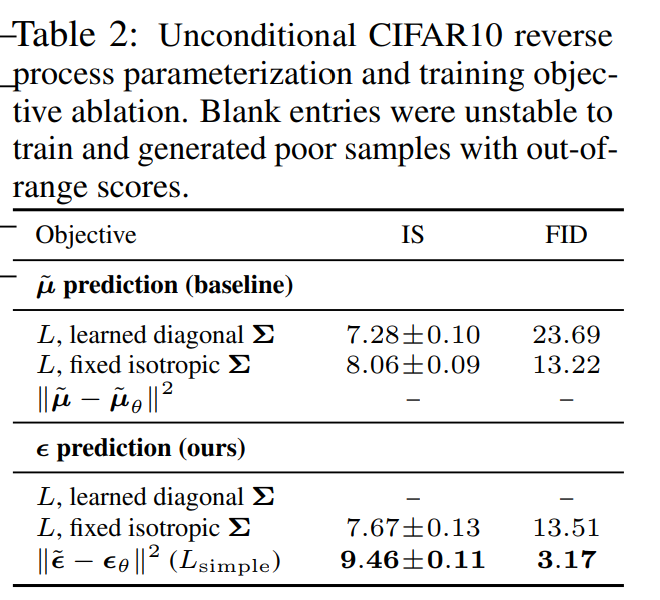
- 如果预测 \(\tilde {\mu}\) ,只有当使用 variational bound 损失函数时才有效,而不能使用 MSE。
- 反向过程的 variances \(\sigma_{\theta}(\mathbf{x_{t}},t)\) 如果设置成可学习的,会让训练过程不稳定,并且相比固定的 variances 效果更差。
- 如果预测 \(\epsilon\) ,可以和使用固定的 variances,并且通过 variational bound 学习 \(\tilde{\mu}\) 得到的效果相媲美,同时它可以使用简化的目标函数训练。
图像生成过程
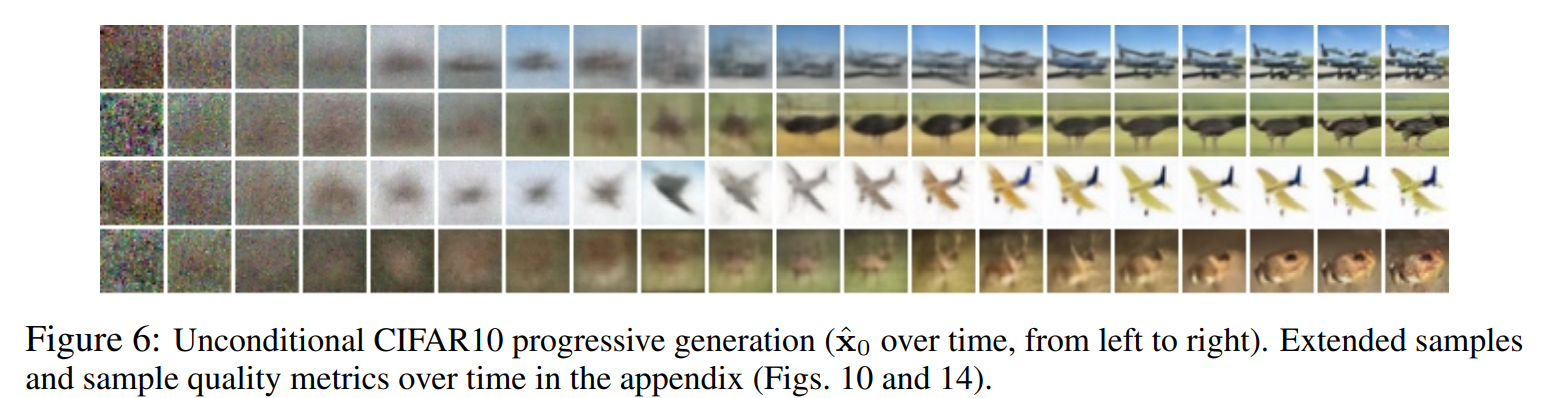
图像生成时,会首先生成大尺度特征,再逐步生成图像细节。如下图所示,最初是随机噪声(最左侧),随着时间步长的增加,逐渐看到模糊的整体图像,最后细节越来越清晰。
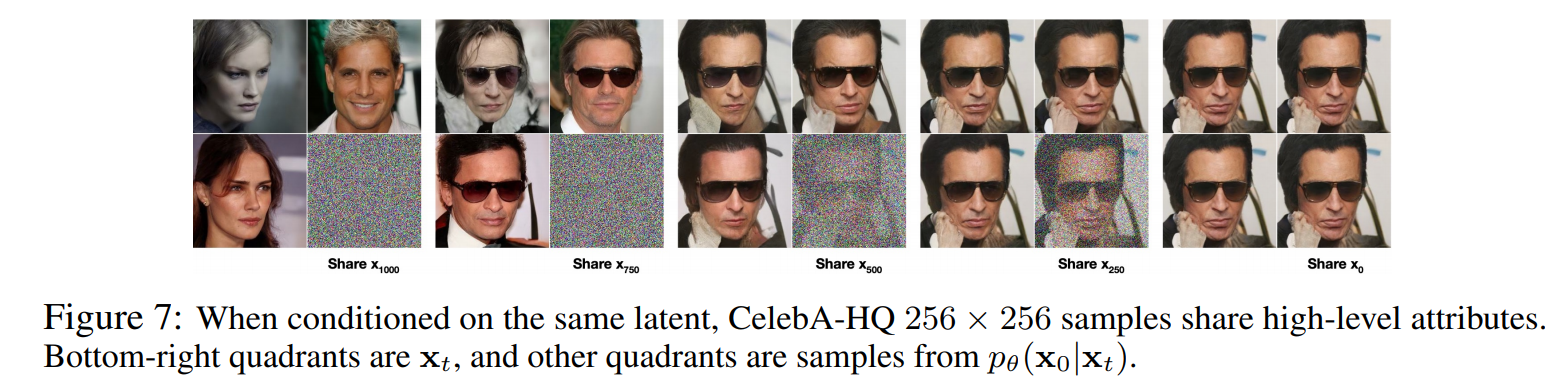
共享潜在变量
Share \(\mathbf{x_{1000}}\) 最左侧有四个图像,这是通过共享四个图像中的右下角 \(\mathbf{x_{1000}}\) 生成的图像。因此,它由相同的噪声生成,但会产生完全不同的图像。
另一方面,Share \(\mathbf{x_{750}}\) 和左侧的第二个图像是从同一 \(\mathbf{x_{750}}\) 生成的图像,虽然有点不同,但他们普遍都戴着太阳镜,此外,500 和 250 会产生类似的效果。
图像插值
首先将随机采样2张 source 图片,\(\mathbf{x_{0}},\mathbf{x_{0}'}\sim q(\mathbf{x_{0}})\),然后通过正向扩散,将图片 encoder到隐空间中,即 \(\mathbf{x_{t}},\mathbf{x_{t}'}\sim q(\mathbf{x_{t}}\mid \mathbf{x_{0}})\),随后在隐空间中插值(此处对论文公式做了修改):
\[\bar{\mathbf{x}}_t=(1-\lambda)\mathbf{x_t}+\lambda\mathbf{x_t'}.\]再通过反向过程将隐空间中插值 decoder 到图像空间上: \(\bar{\mathbf{x}}_{0}\sim p(\mathbf{x_{0}}\mid \mathbf{\bar{x}_{t}})\)
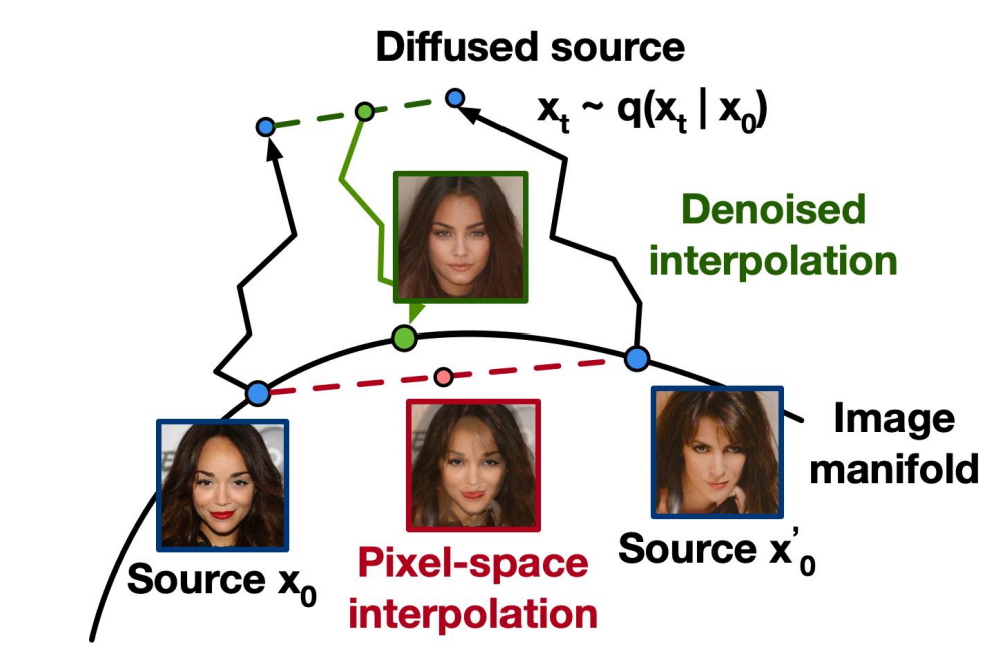
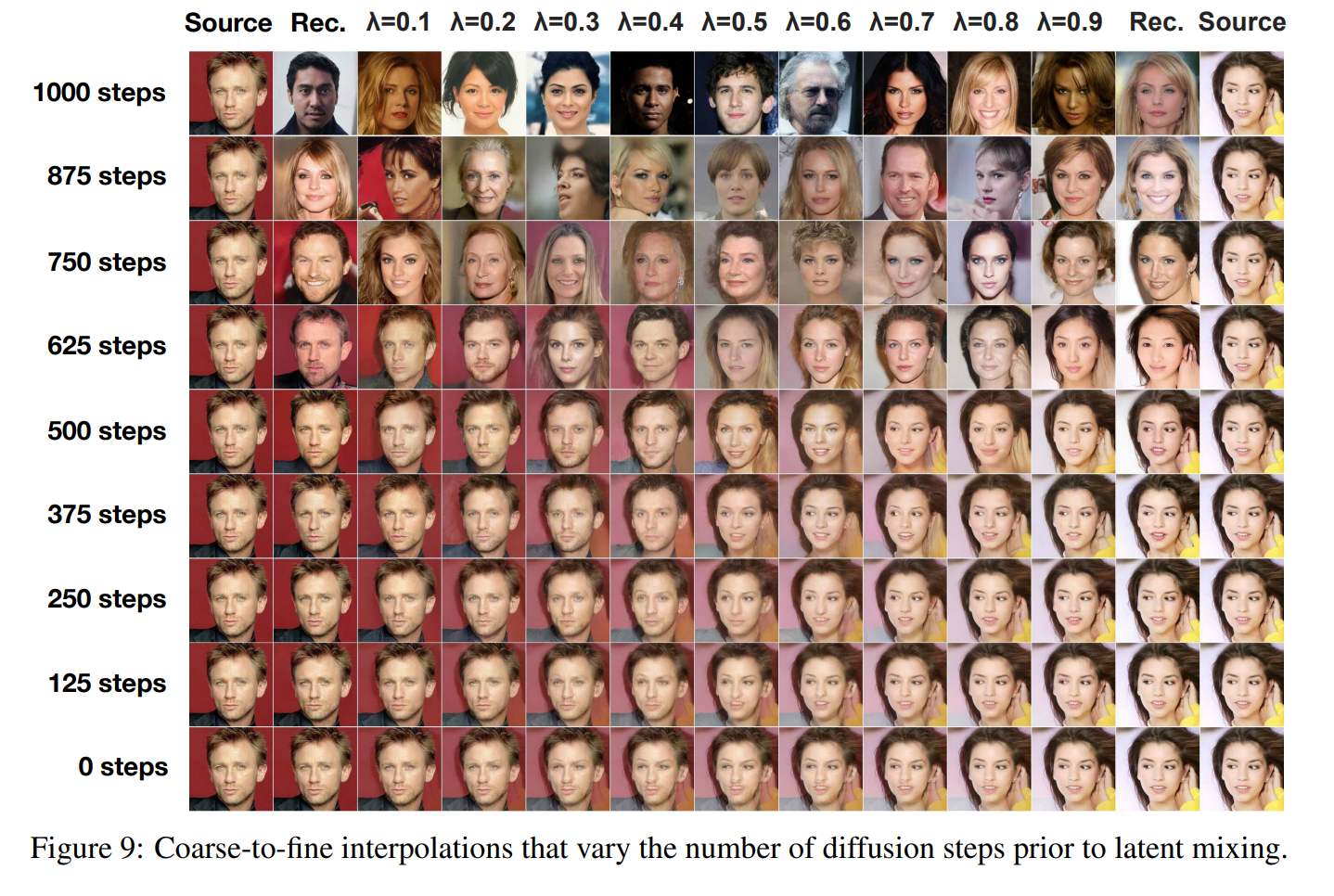
下图显示了不同时间步的隐空间插值和不同 \(\lambda\) 的效果,产生这种效果的个人理解:
(1)\(\lambda\) 越大,隐变量值越接近最右边的 source,所以decoder 到图像空间上,也更像右边的source;
(2)时间步 \(t\) 越大,在 encoder 时,往图片中添加的噪声越多,图片信息丢失越严重,最极端的情况是完全变成了高斯噪声,此时再 decoder 回来,由于随机性得到的图像与原图像差异会很大,这也解释了为什么1000 steps时,产生了更加多样的图片;另外时间步越大,可以产生更加细节的内容,这也在下图有很好的展现。
参考
-
Jascha Sohl-Dickstein et al. “Deep Unsupervised Learning using Nonequilibrium Thermodynamics.” ICML 2015. ↩
-
Jonathan Ho et al. “Denoising diffusion probabilistic models.” arxiv:2006.11239 (2020). [code] ↩ ↩2 ↩3
-
Lil’Log. What are Diffusion Models? ↩